





Das NEO-M8U-Modul führt die Untethered Dead Reckoning (UDR)-Technologie von u-blox ein, die eine kontinuierliche Navigation ermöglicht, ohne dass Geschwindigkeitsinformationen des Fahrzeugs erforderlich sind. Diese innovative Technologie bietet die Vorteile der Koppelnavigation für Installationen, die bisher auf die Verwendung von GNSS beschränkt waren, und senkt die Installationskosten für Koppelnavigationsanwendungen erheblich.
Die Stärke von UDR zeigt sich besonders bei schlechten Signalbedingungen, wo es eine kontinuierliche Positionierung in städtischen Umgebungen ermöglicht, sogar für Geräte mit im Fahrzeug installierten Antennen. Auch bei komplettem Signalausfall, beispielsweise in Parkhäusern und kurzen Tunneln, ist eine brauchbare Ortungsleistung möglich. Mit UDR beginnt die Positionierung, sobald das Modul mit Strom versorgt wird, noch bevor der erste GNSS-Fix verfügbar ist.
Das NEO-M8U kann ohne Konfiguration an jeder beliebigen Stelle im Fahrzeug eingebaut werden. Die integrierten Beschleunigungs- und Gyroskopsensoren machen das Modul nicht nur frei von jeglicher elektrischer Verbindung zum Fahrzeug, sondern sorgen auch für eine völlig eigenständige Lösung, die sich perfekt für eine schnelle Produktentwicklung mit zuverlässiger und konstanter Leistung eignet.
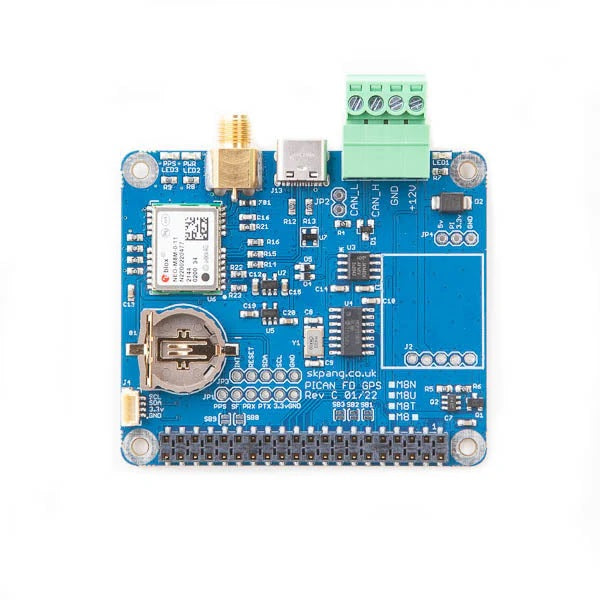
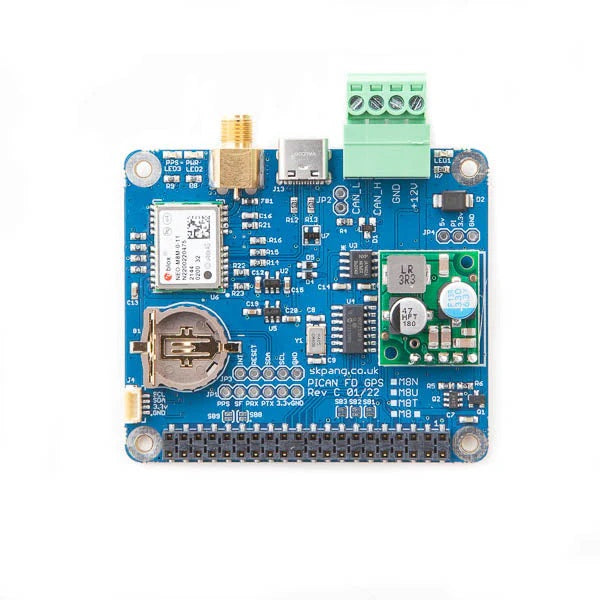
Der Anschluss der Antenne erfolgt über einen SMA-Stecker. Klassisches CAN und CAN FD wird durch den Microchip MCP2518FD IC bereitgestellt.
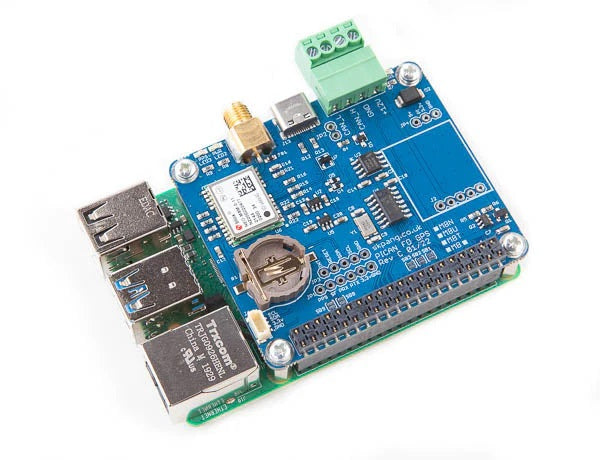
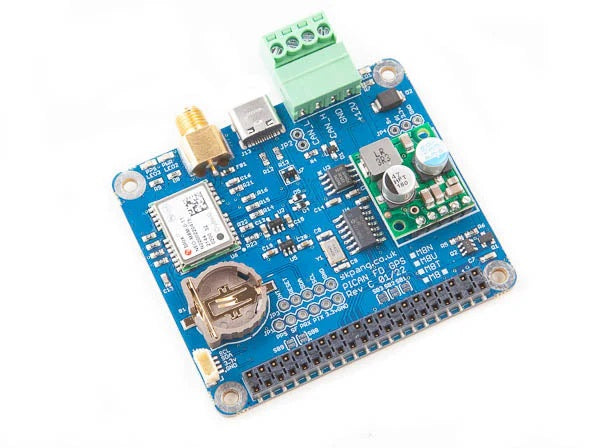
Einfach zu installierender SocketCAN-Treiber. Die Programmierung kann in C oder Python erfolgen. Optionales 3A SMPS-Modul, das die PiCAN FD GPS/GNSS-Karte und den Raspberry Pi mit 7 bis 24 V externer Spannung versorgen kann.
CAN FD Merkmale
- Microchip MCP2518FD CAN-Steuerung
- Arbitrierungs-Bitrate bis zu 1 Mbps
- Daten-Bitrate bis zu 8 Mbps
- CAN FD Controller-Modi
- Gemischter CAN 2.0B- und CANFD-Modus
- CAN 2.0B-Betrieb
- Hochgeschwindigkeits-SPI-Schnittstelle (10 MHz)
- 120Ω-Abschlusswiderstand bereit
- LED-Anzeige (GPIO04)
- Vier Befestigungslöcher, entsprechen dem Pi Hat Standard
- SocketCAN-Treiber, erscheint in der Anwendung als can0
- Unterbrechung RX auf GPIO25
- Fixierte Status-LED
NEO-M8U Merkmale
- 72-Kanal u-blox M8-Engine GPS/QZSS L1 C/A, GLONASS L10F, BeiDou B1, SBAS L1 C/A: WAAS, EGNOS, MSAS, Galileo-ready E1B/C
- USB-C, I2C und UART-Kommunikation
- SMA-Antennenanschluss
- u-center Software kompatibel, erfordert Windows PC über USB-C
- Zeitimpuls-LED
- Die UDR-Funktion des NEO-M8U ist nur für Kraftfahrzeuge und Motorräder geeignet.
UDR-Technologie
Die proprietäre UDR-Lösung (Untethered Dead Reckoning) von u-blox verwendet eine im Modul enthaltene Inertialmesseinheit (IMU). IMU-Daten und GNSS-Signale werden gemeinsam verarbeitet, wodurch eine genaue und kontinuierliche Positionierung in GNSS-unfreundlichen Umgebungen (z. B. Stadtschluchten) und eine nützliche Positionierung auch bei vollständigem Fehlen von GNSS-Signalen (z. B. in Tunneln und Parkhäusern) erreicht wird.
Der NEO-M8U kombiniert GNSS- und IMU-Messungen und berechnet Positionslösungen mit einer Rate von bis zu 2 Hz. Diese Lösungen werden in Standard-NMEA-, UBX-NAV-PVT- und verwandten Nachrichten gemeldet. Eine neue Nachricht mit hoher Navigationsrate (UBX-HNR-PVT) erweitert diese Ergebnisse mit reinen IMU-Daten, um genaue Positionslösungen mit geringer Latenz bei Raten von bis zu 30 Hz zu liefern.
Koppelnavigation ermöglicht den Beginn der Navigation, sobald das Modul mit Strom versorgt wird (d. h. bevor ein GNSS-Fix hergestellt wurde) und unter allen folgenden Bedingungen:
- Das Fahrzeug wurde nicht bewegt, ohne dass das Modul mit Strom versorgt wurde.
- Zum Zeitpunkt der letzten Benutzung des Fahrzeugs war mindestens ein Dead-Reckoning-Fix verfügbar.
- Seit der letzten Benutzung des Fahrzeugs war eine Notstromversorgung für das Modul verfügbar.
Die Funktion „Speichern beim Abschalten“ kann verwendet werden, wenn keine Notstromversorgung verfügbar ist. Alle erforderlichen Informationen werden im Flash gespeichert und beim Neustart aus dem Flash gelesen. Weitere Details finden Sie in der u-blox 8 / u-blox M8 Receiver Description / Protocol Specification.
Für Post-Processing-Anwendungen sind Sensordaten über die Nachrichten UBX-ESF-MEAS und UBX-ESF-RAW (hohe Rate) verfügbar. Jede Nachricht enthält den Zeitpunkt der Messung.
Dokumente
-
Schematische Darstellung
-
Benutzerhandbuch
-
NEO-M8U Zusammenfassung
-
NEO-M8U-Datenblatt
-
u-blox Protokoll-Spezifikation
-
u-blox UDR White Paper
-
u-blox u-center Software Herunterladen
English Description
The NEO-M8U module introduces u-blox’s Untethered Dead Reckoning (UDR) technology, which provides continuous navigation without requiring speed information from the vehicle. This innovative technology brings the benefits of dead reckoning to installations previously restricted to using GNSS alone and significantly reduces the cost of installation for aftermarket dead reckoning applications.
The strength of UDR is particularly evident under poor signal conditions, providing continuous positioning in urban environments even for devices with antennas installed inside the vehicle. Useful positioning performance is also available during complete signal loss, such as in parking garages and short tunnels. With UDR, positioning begins as soon as power is applied to the module, even before the first GNSS fix is available.
The NEO-M8U can be installed in any position within the vehicle without configuration. Its integrated accelerometer and gyroscope sensors make the module not only free from any electrical connection to the vehicle but also a fully self-contained solution, ideal for rapid product development with reliable and consistent performance.
Antenna connection is via an SMA connector. Classic CAN and CAN FD are provided by the Microchip MCP2518FD IC.
Easy-to-install SocketCAN driver. Programming can be done in C or Python. Optional 3A SMPS module can power the PiCAN FD GPS/GNSS board and Raspberry Pi from 7 to 24V external supply.
CAN FD Features
- Microchip MCP2518FD CAN Controller
- Arbitration Bit Rate up to 1 Mbps
- Data Bit Rate up to 8 Mbps
- CAN FD Controller modes
- Mixed CAN 2.0B and CANFD mode
- CAN 2.0B mode
- High-speed SPI Interface (10 MHz)
- 120Ω terminator ready
- LED indicator (GPIO04)
- Four fixing holes, comply with Pi Hat standard
- SocketCAN driver, appears as can0 to application
- Interrupt RX on GPIO25
- Fixed status LED
NEO-M8U Features
- 72-channel u-blox M8 engine GPS/QZSS L1 C/A, GLONASS L10F, BeiDou B1, SBAS L1 C/A: WAAS, EGNOS, MSAS, Galileo-ready E1B/C
- USB-C, I2C, and UART communication
- SMA antenna connection
- u-center software compatible; requires Windows PC via USB-C
- Time Pulse LED
- UDR feature is suitable only for motor vehicles and motorcycles.
UDR Technology
u-blox’s proprietary Untethered Dead Reckoning (UDR) solution uses an inertial measurement unit (IMU) included within the module. IMU data and GNSS signals are processed together to achieve accurate and continuous positioning in GNSS-hostile environments (e.g., urban canyons) and useful positioning even in cases of complete GNSS signal absence (e.g., tunnels and parking garages).
The NEO-M8U combines GNSS and IMU measurements and calculates position solutions at rates of up to 2 Hz. These solutions are reported in standard NMEA, UBX-NAV-PVT, and related messages. A new high navigation rate output message (UBX-HNR-PVT) extends these results with IMU-only data, delivering accurate, low-latency position solutions at rates of up to 30 Hz.
Dead reckoning allows navigation to commence as soon as power is applied to the module (i.e., before a GNSS fix has been established) and under the following conditions:
- The vehicle has not been moved without power applied to the module.
- At least one dead-reckoning fix was available when the vehicle was last used.
- A backup power supply has been available for the module since the vehicle was last used.
The “save-on-shutdown” feature can be used if no backup power supply is available. All necessary information will be saved to flash and read from the flash upon restart. For more details, see the u-blox 8 / u-blox M8 Receiver Description / Protocol Specification.
For post-processing applications, sensor data is available from messages UBX-ESF-MEAS and UBX-ESF-RAW (high rate). Each message includes the time of measurement.