




Adafruit 9-DOF Absolute Orientation IMU Fusion Breakout - BNO055
Dieses Produkt ist EOL!
Wenn Sie jemals einen 9-DOF-Sensor bestellt und verdrahtet haben, haben Sie wahrscheinlich auch die Herausforderung erkannt, die Sensordaten von Beschleunigungsmesser, Gyroskop und Magnetometer in eine tatsächliche "3D-Raumorientierung" umzuwandeln! Die Orientierung ist ein schwer zu lösendes Problem. Die Algorithmen für die Sensorfusion (die geheime Soße, die Beschleunigungsmesser-, Magnetometer- und Gyroskopdaten zu einer stabilen dreiachsigen Orientierungsausgabe zusammenführt) können äußerst schwierig sein, wenn es darum geht, die richtige Lösung zu finden und auf kostengünstigen Echtzeitsystemen zu implementieren.
Bosch ist das erste Unternehmen, dem dies gelungen ist, indem es einen MEMS-Beschleunigungssensor, einen Magnetometer und ein Gyroskop auf einem einzigen Chip zusammen mit einem ARM Cortex-M0-basierten Hochgeschwindigkeitsprozessor untergebracht hat, der alle Sensordaten verarbeitet, die Sensorfusion und die Echtzeitanforderungen abstrahiert und Daten ausspuckt, die in Quaternionen, Euler-Winkeln oder Vektoren verwendet werden können.
Anstatt sich wochen- oder monatelang mit Algorithmen unterschiedlicher Genauigkeit und Komplexität herumzuschlagen, können Sie dank des BNO055 - eines intelligenten 9-DOF-Sensors, der die Sensorfusion ganz allein durchführt - innerhalb von Minuten über aussagekräftige Sensordaten verfügen. Sie können die Daten direkt über I2C auslesen und schon ist Bob Ihr Onkel.
Der BNO055 kann die folgenden Sensordaten ausgeben:
- Absolute Orientierung (Euler-Vektor, 100Hz) Dreiachsige Orientierungsdaten basierend auf einer 360°-Kugel
- Absolute Orientierung (Quaternion, 100Hz) Vier-Punkt-Quaternion-Ausgabe für eine genauere Datenmanipulation
- Winkelgeschwindigkeitsvektor (100Hz) Drei Achsen der "Rotationsgeschwindigkeit" in rad/s
- Beschleunigungsvektor (100Hz) Drei Achsen der Beschleunigung (Schwerkraft + lineare Bewegung) in m/s^2
- Magnetfeldstärkevektor (20Hz) Drei Achsen der Magnetfeldmessung in Mikro-Tesla (uT)
- Linearer Beschleunigungsvektor (100Hz) Drei Achsen der linearen Beschleunigungsdaten (Beschleunigung minus Schwerkraft) in m/s^2
- Gravitationsvektor (100Hz) Drei Achsen der Gravitationsbeschleunigung (abzüglich jeglicher Bewegung) in m/s^2
- Temperatur (1Hz) Umgebungstemperatur in Grad Celsius
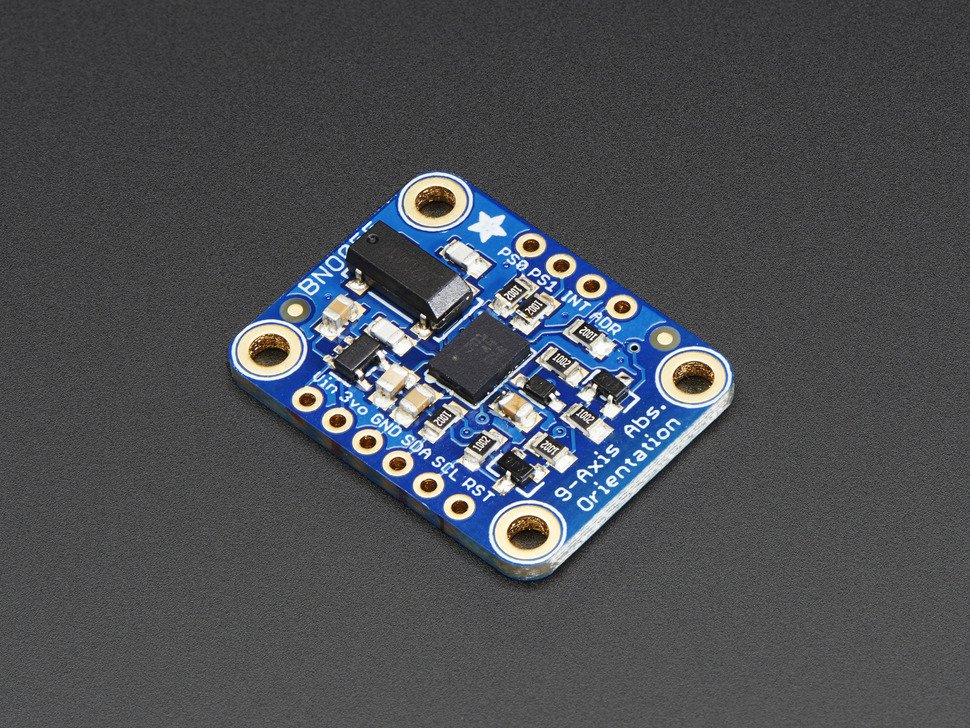
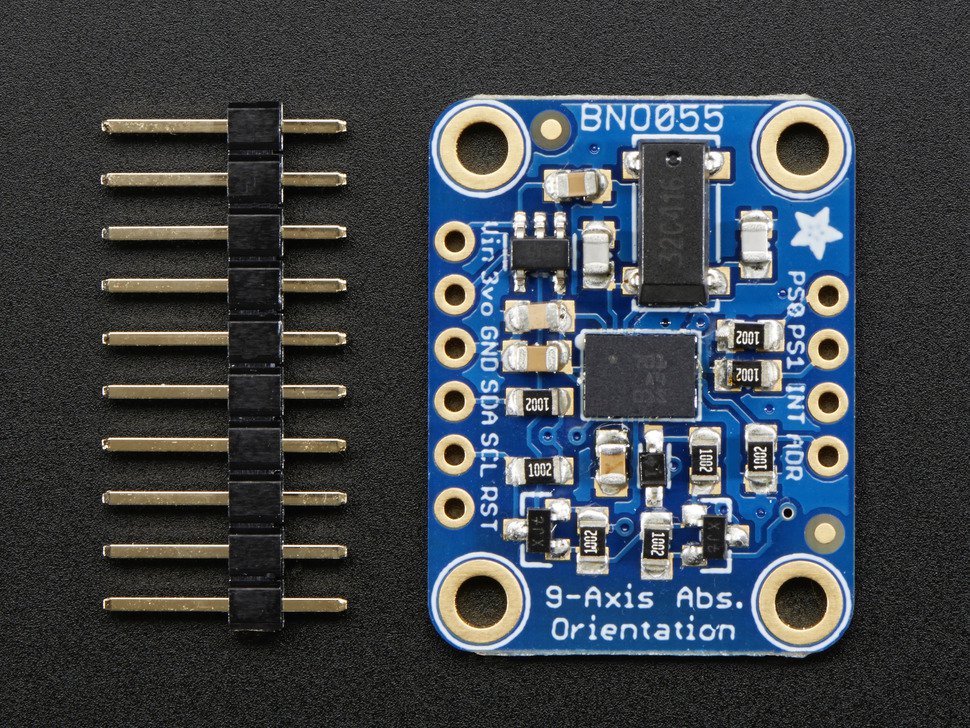
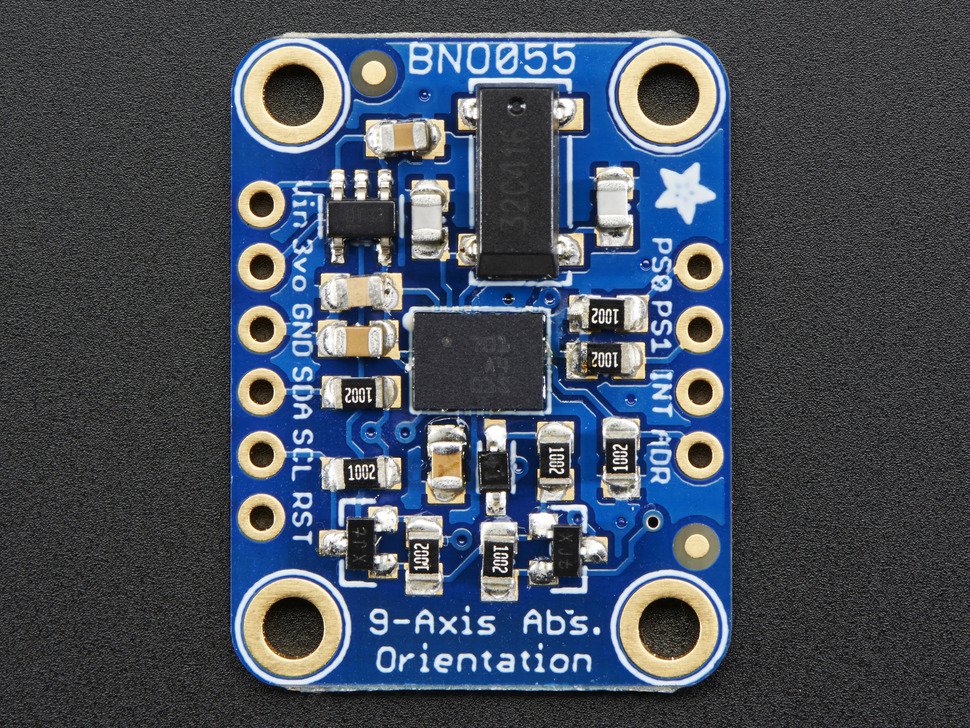
Praktisch, nicht wahr? Also haben wir diesen sehr schönen Sensor auf einem eigenen Breakout untergebracht, komplett mit 3,3V-Regler, Logik-Level-Shifting für die Reset- und I2C-Pins, einem externen 32,768KHz-Quarz (empfohlen für beste Leistung) und Breakouts für einige andere Pins, die Sie vielleicht praktisch finden. Wird zusammengebaut und getestet geliefert, mit einem kleinen Stück Header. Es sind einige Lötarbeiten erforderlich, um den Header mit der Breakout-Platine zu verbinden, aber die Arbeit ist ziemlich einfach. Das Beste von allem ist, dass Sie in 10 Minuten mit unserem praktischen Tutorial über den Zusammenbau, die Verdrahtung, die CircuitPython & Arduino-Bibliotheken und die grafische Processing-Oberfläche und vieles mehr loslegen können!
- Abmessungen: 20mm x 27mm x 4mm / 0.8" x 1.1" x 0.2"
- Die Löcher für den Header beginnen 4 mm von den Montagelöchern entfernt
- Abmessungen der Befestigungslöcher: 20mm x 12mm Abstand
- Verwendet die I2C-Adresse 0x28 (Standard) oder 0x29
- Gewicht: 3g
- Datenblatt, EagleCAD PCB-Dateien und Fritzing sind im Produkttutorial verfügbar
Adafruit 9-DOF Absolute Orientation IMU Fusion Breakout - BNO055
This product ist EOL!
If you've ever ordered and wire up a 9-DOF sensor, chances are you've also realized the challenge of turning the sensor data from an accelerometer, gyroscope and magnetometer into actual "3D space orientation"! Orientation is a hard problem to solve. The sensor fusion algorithms (the secret sauce that blends accelerometer, magnetometer and gyroscope data into stable three-axis orientation output) can be mind-numbingly difficult to get right and implement on low cost real time systems.
Bosch is the first company to get this right by taking a MEMS accelerometer, magnetometer and gyroscope and putting them on a single die with a high speed ARM Cortex-M0 based processor to digest all the sensor data, abstract the sensor fusion and real time requirements away, and spit out data you can use in quaternions, Euler angles or vectors.
Rather than spending weeks or months fiddling with algorithms of varying accuracy and complexity, you can have meaningful sensor data in minutes thanks to the BNO055 - a smart 9-DOF sensor that does the sensor fusion all on its own! You can read the data right over I2C and Bob's yer uncle.
The BNO055 can output the following sensor data:
- Absolute Orientation (Euler Vector, 100Hz) Three axis orientation data based on a 360° sphere
- Absolute Orientation (Quaterion, 100Hz) Four point quaternion output for more accurate data manipulation
- Angular Velocity Vector (100Hz) Three axis of 'rotation speed' in rad/s
- Acceleration Vector (100Hz) Three axis of acceleration (gravity + linear motion) in m/s^2
- Magnetic Field Strength Vector (20Hz) Three axis of magnetic field sensing in micro Tesla (uT)
- Linear Acceleration Vector (100Hz) Three axis of linear acceleration data (acceleration minus gravity) in m/s^2
- Gravity Vector (100Hz) Three axis of gravitational acceleration (minus any movement) in m/s^2
- Temperature (1Hz) Ambient temperature in degrees celsius
Handy, right? So we placed this very nice sensor on its own breakout, complete with 3.3V regulator, logic level shifting for the Reset and I2C pins, an external 32.768KHz crystal (recommended for best performance), and breakouts for some other pins you might find handy. Comes assembled and tested, with a small piece of header. Some soldering is required to attach the header to the breakout PCB, but its pretty easy work. Best of all you can get started in 10 minutes with our handy tutorial on assembly, wiring, CircuitPython & Arduino libraries, and Processing graphical interface, and more!
- Dimensions: 20mm x 27mm x 4mm / 0.8" x 1.1" x 0.2"
- Header holes begin 4mm from the mounting holes
- Mounting Hole dimensions: 20mm x 12mm apart
- Uses I2C address 0x28 (default) or 0x29
- Weight: 3g
- Datasheet, EagleCAD PCB files, and Fritzing available in the product tutorial
Sicherheitsangaben
- Lesen Sie die Bedienungsanleitung sorgfältig durch, bevor Sie das Produkt verwenden.
- Stellen Sie sicher, dass alle Montage- und Installationsanweisungen des Herstellers sorgfältig befolgt werden.
- Verwenden Sie das Produkt nur für den vorgesehenen Zweck.
- Die unsachgemäße Nutzung dieses Produkts kann zu schweren Verletzungen oder Sachschäden führen.
- Nicht für Kinder unter 10 Jahren geeignet.
- Bei unsachgemäßer Verwendung besteht eine Verletzungsgefahr.
- Dieses Produkt entspricht den geltenden Sicherheitsanforderungen der Europäischen Union.
- Dieses Produkt wurde gemäß der GPSR geprüft, die sicherstellt, dass alle relevanten Sicherheitsanforderungen für Konsumgüter eingehalten werden.
Nachverfolgbarkeitsinformationen
Jedes Produkt verfügt über eines oder mehrere der folgenden Merkmale:
- Ein CE-Kennzeichen, das die Einhaltung der Sicherheits-, Gesundheits- und Umweltschutzanforderungen der Europäischen Union anzeigt.
- Eine eindeutige Serien- oder Chargennummer, um die Nachverfolgbarkeit zu gewährleisten und bei Bedarf Rückrufaktionen zu unterstützen.
- Hersteller- und Importeurangaben für den Kundensupport und Sicherheitsanfragen.
Überwachung und Berichterstattung von Vorfällen
Für den unwahrscheinlichen Fall eines Produktproblems haben wir Verfahren implementiert, um:
- Kundenbeschwerden zeitnah bearbeiten.
- Schwerwiegende Vorfälle über das EU Safety Gate/RAPEX-System melden.
- Mit den Marktüberwachungsbehörden zusammenarbeiten, um die öffentliche Sicherheit zu gewährleisten.
Kontakt:
- Email: support [@] pi3g.com
- Telefon: 0341 / 392 858 40
Dieses Produkt ist vollständig mit allen geltenden EU-Vorschriften konform, um die Sicherheit unserer geschätzten Kunden zu gewährleisten.