









Mit dieser netten kleinen Zusatzplatine können Sie zwei Mikro-Metall-Getriebemotoren von einem Raspberry Pi Pico aus steuern - kleine Roboter ahoi!
Löte dieses SHIM auf die Rückseite deines Pico und schalte die magische Fähigkeit frei, bis zu zwei unserer Mikro-Metall-Getriebemotoren anzuschließen (mit diesen ordentlichen kurzen Motorkabeln). Um sie per Kabel zu verbinden, müssen Ihre Motoren mit Motor Connector Shims ausgestattet sein (aber wenn Sie die Shims nicht selbst an die Motoren löten möchten, verkaufen wir sie auch mit vormontierten Motoren).
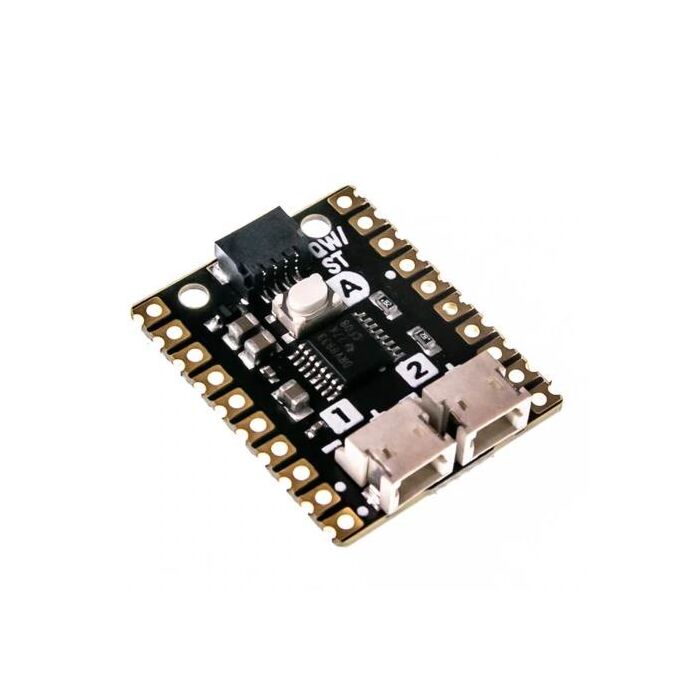
Zusätzlich zum Motortreiber verfügt das Motor SHIM für Pico über einen vielseitig einsetzbaren und beliebten Benutzerknopf sowie einen Qw/ST-Anschluss, an den Sie Breakouts anschließen und Ihren winzigen Roboter mit einigen intelligenten Funktionen ausstatten können. Du könntest damit einen winzigen Roboter mit Vorderradantrieb (wie einen Mini-Trilobot) oder sogar einen Balancierroboter in Streichholzschachtelgröße bauen.
Wir haben ihn so schlank wie möglich gestaltet und verwenden nur wenige Pins, damit er sich leicht mit anderen Add-Ons wie unseren Pico Packs und Basen kombinieren lässt. Für einen kleinen batteriebetriebenen Roboter mit LiPo-Ladung und einem An/Aus-Knopf können Sie einen Pimoroni Pico LiPo verwenden oder dieses SHIM mit einem LiPo SHIM für Pico kombinieren!
Motor SHIM für Pico wird von einer gut dokumentierten C++/MicroPython Motorbibliothek mit vielen Beispielen unterstützt - es gibt sogar eines, mit dem du deinen Motoren das Singen beibringen kannst! 🎶
- Dualer H-Brücken-Motortreiber (DRV8833)
- 2 JST-ZH-Stecker (2-polig) zum Anschließen von Motoren
- Benutzer-Taster
- Qw/ST (Qwiic/STEMMA QT) Stecker für den Anschluss von Breakouts
- Kompatibel mit Raspberry Pi Pico.
- Löten erforderlich.
- C++/MicroPython-Bibliotheken
- Schaltplan
Raspberry Pi Pico, Header und andere abgebildete Komponenten sind separat erhältlich.
Zusammenbau
Sie müssen das SHIM auf der Rückseite Ihres Pico anlöten, wobei die Montagelöcher auf der Seite des USB-Anschlusses liegen müssen. Der Text "PICO MOTOR SHIM" auf dem SHIM und die Pinbeschriftungen auf der Rückseite des Pico sollten einander zugewandt sein.
Software
Unsere C++/MicroPython-Bibliotheken sind vollgepackt mit leistungsstarken Funktionen für die Arbeit mit Motoren. Die beste Leistung erhältst du mit C++, aber wenn du ein Anfänger bist, empfehlen wir dir, unser MicroPython-Build zu verwenden, das in den Batterien enthalten ist, um den Einstieg zu erleichtern.
- MicroPython der Marke Pirate herunterladen
- MicroPython-API-Dokumentation
- MicroPython-Beispiele
- C++ Beispiele
Alternativ können Sie CircuitPython verwenden, um Motoren mit Ihrem Raspberry Pi Pico anzusteuern, wenn Sie alle Annehmlichkeiten des Ökosystems von Adafruit nutzen möchten.
Anmerkungen
- Abmessungen: ca. 26mm x 21mm x 5mm (L x B x H, einschließlich der Anschlüsse)
- Wenn du ehrgeizig in Sachen experimentelles Löten bist, kannst du versuchen, den Pico und das SHIM beide an das kurze Ende deines Headers zu löten, Rücken an Rücken - so dass die langen Enden der Pins frei bleiben, um andere Dinge anzuschließen. Diese Methode macht das Pico/SHIM-Gehäuse viel schlanker, aber Sie müssen sicherstellen, dass Ihre Lötstellen guten Kontakt mit den Pads beider Platinen und der Stiftleiste haben.
- Wenn Sie das Motor-SHIM nicht dauerhaft an Ihrem Pico befestigen möchten, können Sie es auch an ein Paar Buchsenleisten anlöten (wie auf den Fotos des Pimoroni Pico LiPo zu sehen).
- Der kleine rosa Roboter wiegt nur 68,8 g! Er verwendet Motor SHIM für Pico, LiPo SHIM für Pico, eine 1/2" Kugelrolle, weiße Motorhalterungen, 32x7mm Räder und einen kleinen 150mAh LiPo-Akku. Die Chassis-Grundplatte ist aus 3mm Acryl gelasert (Download der .dxf-Datei).
This neat little add-on board lets you drive two micro metal gearmotors from a Raspberry Pi Pico - tiny robots ahoy!
Solder this SHIM to the back of your Pico and unlock the magical ability to plug in up to two of our micro metal gearmotors (using these tidy short motor cables). To connect them up via cable, your motors will need to be equipped with Motor Connector Shims (but if you'd rather not solder the shims to the motors yourself, we also sell them with motors pre-attached).
In addition to the motor driver, Motor SHIM for Pico features a multi-purpose and ever popular user button plus a Qw/ST connector so you can attach breakouts and give your diminutive robot some smarts. You could use it to make a tiny front wheel drive robot (like a mini Trilobot) or even a matchbox sized balancing robot.
We've designed it to be as slimline as possible and use minimal pins so it can be combined easily with other add-ons, like our Pico Packs and Bases. For a smol battery powered robot with LiPo charging and an on/off button, consider using a Pimoroni Pico LiPo or stack this SHIM with a LiPo SHIM for Pico!
Motor SHIM for Pico is supported by a well documented C++/MicroPython motor library with lots of examples - there's even one to teach your motors how to sing! 🎶
- Dual H-Bridge motor driver (DRV8833)
- 2 JST-ZH connectors (2 pin) for attaching motors
- User button
- Qw/ST (Qwiic/STEMMA QT) connector for attaching breakouts
- Compatible with Raspberry Pi Pico.
- Soldering required.
- C++/MicroPython libraries
- Schematic
Raspberry Pi Pico, headers and other components shown are sold separately.
Assembly
You'll need to solder the SHIM to the back of your Pico, with the mounting holes lining up at the USB port end. The 'PICO MOTOR SHIM' text on the SHIM and the pin labels on the back of the Pico should be facing each other.
Software
Our C++/MicroPython libraries are packed with powerful features for working with motors. You'll get best performance using C++, but if you're a beginner we'd recommend using our batteries included MicroPython build for ease of getting started.
Alternatively, you can use CircuitPython to drive motors with your Raspberry Pi Pico, if you want access to all the nice conveniences of Adafruit's ecosystem.
Notes
- Dimensions: approx 26mm x 21mm x 5mm (L x W x H, including connectors)
- If you're ambitious in the ways of experimental soldering, you can try soldering the Pico and the SHIM both to the short end of your header, back to back - leaving the long ends of the pins free to plug into other things. This method makes for a much more slimline Pico/SHIM package, but you'll need to make sure your solder joints make good contact with the pads of both boards and the header.
- If you'd prefer not to attach Motor SHIM permanently to your Pico, consider soldering it to a pair of socket headers (as pictured in the photos of Pimoroni Pico LiPo).
- The little pink robot weighs just 68.8g! It uses Motor SHIM for Pico, LiPo SHIM for Pico, a 1/2" ball caster, white motor brackets , 32x7mm wheels and a dinky 150mAh LiPo battery. The chassis baseplate is laser cut from 3mm acrylic (download the .dxf file).
Sicherheitsangaben
- Lesen Sie die Bedienungsanleitung sorgfältig durch, bevor Sie das Produkt verwenden.
- Stellen Sie sicher, dass alle Montage- und Installationsanweisungen des Herstellers sorgfältig befolgt werden.
- Verwenden Sie das Produkt nur für den vorgesehenen Zweck.
- Die unsachgemäße Nutzung dieses Produkts kann zu schweren Verletzungen oder Sachschäden führen.
- Nicht für Kinder unter 10 Jahren geeignet.
- Bei unsachgemäßer Verwendung besteht eine Verletzungsgefahr.
- Dieses Produkt entspricht den geltenden Sicherheitsanforderungen der Europäischen Union.
- Dieses Produkt wurde gemäß der GPSR geprüft, die sicherstellt, dass alle relevanten Sicherheitsanforderungen für Konsumgüter eingehalten werden.
Nachverfolgbarkeitsinformationen
Jedes Produkt verfügt über eines oder mehrere der folgenden Merkmale:
- Ein CE-Kennzeichen, das die Einhaltung der Sicherheits-, Gesundheits- und Umweltschutzanforderungen der Europäischen Union anzeigt.
- Eine eindeutige Serien- oder Chargennummer, um die Nachverfolgbarkeit zu gewährleisten und bei Bedarf Rückrufaktionen zu unterstützen.
- Hersteller- und Importeurangaben für den Kundensupport und Sicherheitsanfragen.
Überwachung und Berichterstattung von Vorfällen
Für den unwahrscheinlichen Fall eines Produktproblems haben wir Verfahren implementiert, um:
- Kundenbeschwerden zeitnah bearbeiten.
- Schwerwiegende Vorfälle über das EU Safety Gate/RAPEX-System melden.
- Mit den Marktüberwachungsbehörden zusammenarbeiten, um die öffentliche Sicherheit zu gewährleisten.
Kontakt:
- Email: support [@] pi3g.com
- Telefon: 0341 / 392 858 40
Dieses Produkt ist vollständig mit allen geltenden EU-Vorschriften konform, um die Sicherheit unserer geschätzten Kunden zu gewährleisten.