
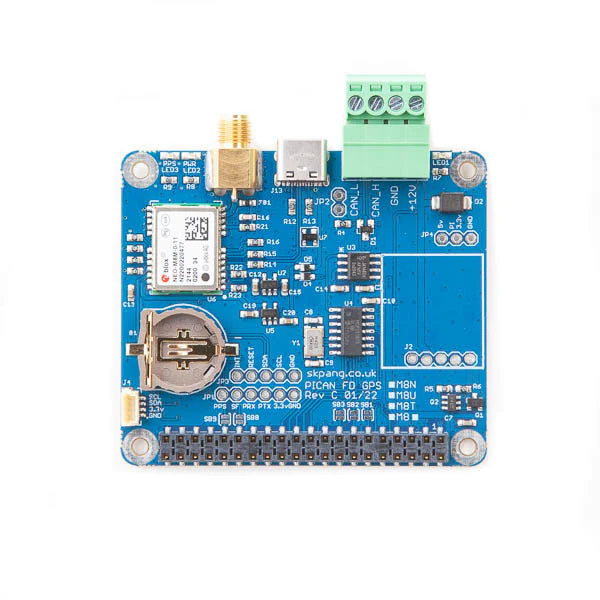



Diese PiCAN FD Karte mit ublox NEO-M8M GPS/GNSS Empfänger. Die NEO-M8 Module nutzen den gleichzeitigen Empfang von bis zu drei GNSS-Systemen (GPS/Galileo zusammen mit BeiDou oder GLONASS), erkennen mehrere Konstellationen gleichzeitig und bieten eine hervorragende Positionierungsgenauigkeit in Szenarien, in denen Stadtschluchten oder schwache Signale beteiligt sind. Der Anschluss der Antenne erfolgt über einen SMA-Stecker.
Klassisches CAN und CAN FD wird durch den Microchip MCP2518FD IC bereitgestellt.
Einfach zu installierender SocketCAN-Treiber. Die Programmierung kann in C oder Python erfolgen.
Optionales 3A SMPS-Modul, das die PiCAN FD GPS/GNSS-Karte und den Raspberry Pi mit 7 bis 24 V externer Spannung versorgen kann.
Klassisches CAN und CAN FD wird durch den Microchip MCP2518FD IC bereitgestellt.
Einfach zu installierender SocketCAN-Treiber. Die Programmierung kann in C oder Python erfolgen.
Optionales 3A SMPS-Modul, das die PiCAN FD GPS/GNSS-Karte und den Raspberry Pi mit 7 bis 24 V externer Spannung versorgen kann.
CAN FD Merkmale
- Microchip MCP2518FD CAN-Steuerung
- Arbitrierungs-Bitrate bis zu 1Mbps
- Daten-Bitrate bis zu 8Mbps
- CAN FD Controller-Modi
- Gemischter CAN 2.0B- und CANFD-Modus
- CAN 2.0B-Betrieb
- Hochgeschwindigkeits-SPI-Schnittstelle (10 MHz)
- 120Ω-Abschlusswiderstand bereit
- LED-Anzeige (GPIO04)
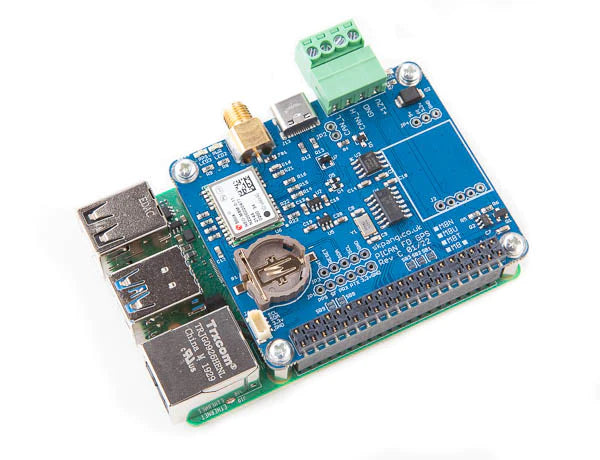
- Vier Befestigungslöcher, entsprechen dem Pi Hat Standard
- SocketCAN-Treiber, erscheint in der Anwendung als can0
- Unterbrechung RX auf GPIO25
- Fixierte Status-LED
NEO-M8M Merkmale
- 72-Kanal u-blox M8-Engine GPS/QZSS L1 C/A, GLONASS L10F, BeiDou B1 SBAS L1 C/A: WAAS, EGNOS, MSAS Galileo-ready E1B/C
- USB-C, I2C und UART-Kommunikation
- SMA-Antennenanschluss
- u-center Software kompatibel. Erfordert Windows PC über USB-C
- Zeitimpuls-LED
Dokumente
English description
This PiCAN FD board with ublox NEO-M8M GPS/GNSS receiver. The NEO-M8 modules utilize concurrent reception of up to three GNSS systems (GPS/Galileo togetherwith BeiDou or GLONASS), recognize multiple constellations simultaneously and provide outstandingpositioning accuracy in scenarios where urban canyon or weak signals are involved. Antenna connection is via a SMA connector.
Classic CAN and CAN FD is provided by the Microchip MCP2518FD IC.
Easy to install SocketCAN driver. Programming can be done in C or Python.
Optional 3A SMPS module which can power the PiCAN FD GPS/GNSS board and Raspberry Pi from 7 to 24v external supply.
CAN FD Features
- Microchip MCP2518FD CAN Controller
- Arbitration Bit Rate u pto 1Mbps
- Data Bit Rate upto 8Mbps
- CAN FD Controller modes
- Mixed CAN 2.0B and CANFD mode
- CAN 2.0B mode
- High speed SPI Interface (10 MHz)
- 120Ω terminator ready
- LED indicator (GPIO04)
- Four fixing holes, comply with Pi Hat standard
- SocketCAN driver, appears as can0 to application
- Interrupt RX on GPIO25
- Fix status LED
NEO-M8M Features
- 72-channel u-blox M8 engine GPS/QZSS L1 C/A, GLONASS L10F, BeiDou B1 SBAS L1 C/A: WAAS, EGNOS, MSAS Galileo-ready E1B/C
- USB-C, I2C and UART communication
- SMA antenna connection
- u-center software compatible. Requires Windows PC via USB-C
- Time Pulse LED
GPSR - EU Verantwortliche Person: Maximilian Batz, pi3g GmbH & Co. KG, Zschochersche Allee 1, 04207 Leipzig, Deutschland, support [@] pi3g.com
GPSR - Produkthersteller (Kontaktdaten für GPSR): SK Pang Electronics Ltd, PO BOX 10956, Harlow, Essex, CM20 9JG, Vereinigtes Königreich, +44 20 3286 6988
GPSR - Wirtschaftsakteur: Maximilian Batz, pi3g GmbH & Co. KG, Zschochersche Allee 1, 04207 Leipzig, Deutschland, support [@] pi3g.com
Sicherheitsangaben
- Lesen Sie die Bedienungsanleitung sorgfältig durch, bevor Sie das Produkt verwenden.
- Stellen Sie sicher, dass alle Montage- und Installationsanweisungen des Herstellers sorgfältig befolgt werden.
- Verwenden Sie das Produkt nur für den vorgesehenen Zweck.
- Die unsachgemäße Nutzung dieses Produkts kann zu schweren Verletzungen oder Sachschäden führen.
- Nicht für Kinder unter 10 Jahren geeignet.
- Bei unsachgemäßer Verwendung besteht eine Verletzungsgefahr.
- Dieses Produkt entspricht den geltenden Sicherheitsanforderungen der Europäischen Union.
- Dieses Produkt wurde gemäß der GPSR geprüft, die sicherstellt, dass alle relevanten Sicherheitsanforderungen für Konsumgüter eingehalten werden.
Nachverfolgbarkeitsinformationen
Jedes Produkt verfügt über eines oder mehrere der folgenden Merkmale:
- Ein CE-Kennzeichen, das die Einhaltung der Sicherheits-, Gesundheits- und Umweltschutzanforderungen der Europäischen Union anzeigt.
- Eine eindeutige Serien- oder Chargennummer, um die Nachverfolgbarkeit zu gewährleisten und bei Bedarf Rückrufaktionen zu unterstützen.
- Hersteller- und Importeurangaben für den Kundensupport und Sicherheitsanfragen.
Überwachung und Berichterstattung von Vorfällen
Für den unwahrscheinlichen Fall eines Produktproblems haben wir Verfahren implementiert, um:
- Kundenbeschwerden zeitnah bearbeiten.
- Schwerwiegende Vorfälle über das EU Safety Gate/RAPEX-System melden.
- Mit den Marktüberwachungsbehörden zusammenarbeiten, um die öffentliche Sicherheit zu gewährleisten.
Kontakt:
- Email: support [@] pi3g.com
- Telefon: 0341 / 392 858 40
Dieses Produkt ist vollständig mit allen geltenden EU-Vorschriften konform, um die Sicherheit unserer geschätzten Kunden zu gewährleisten.